Around this time last month, the haze (or what some people call smog) here set a record high level for the Pollutant Standards Index (PSI). This is what it looked like outside:

As our National Environment Agency only published 3 hour PSI averages, I thought it would be good if we could get our own measurements. The PSI used here is somewhat like the Air Quality Index (AQI) used in the US, and is made up of 5 components:
- PM10 particulate matter
- sulphur dioxide (SO2)
- carbon monoxide (CO)
- nitrogen dioxide (NO2)
- ozone
Note that the AQI includes PM2.5 particulate matter whereas PSI does not. From what we can see, I would think that a major contributor to the PSI is particulate matter (PM).
I took a brief look at the projects such as the Air Quality Egg and PACMAN. They used either the Sharp GP2Y1010AU0F or the Shinyei PPD42NS. These sensors generally operate based on the light-scattering principle, by measuring the amount of light that is scattered by particles.
The PPD42NS
Chris Nafis has done a great job documenting the use of both the GP2Y1010AU0F and the PPD42NS, compared against a Dylos DC1100 air quality monitor. As the GP2Y1010AU0F requires a certain pulse waveform to be supplied to its LED pin, I would say that the PPD42NS is self-contained and thus much easier to hook up.
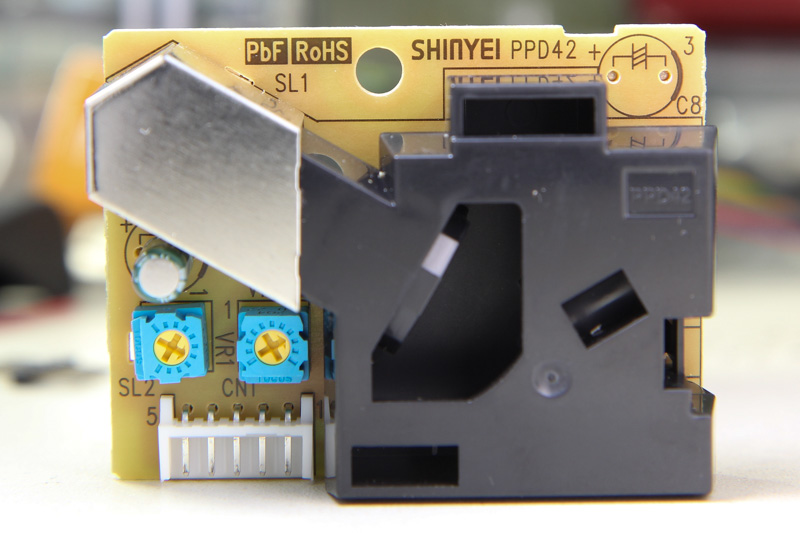
On the front, it has 2 pots labelled VR1 and VR3 that have been already factory-calibrated. The IR detector is covered under the metal can. Interestingly there’s a slot by the side labelled SL2 which is unused. If you’d like to see what’s under the hood, Chris opened up the black casing and posted a photo here.
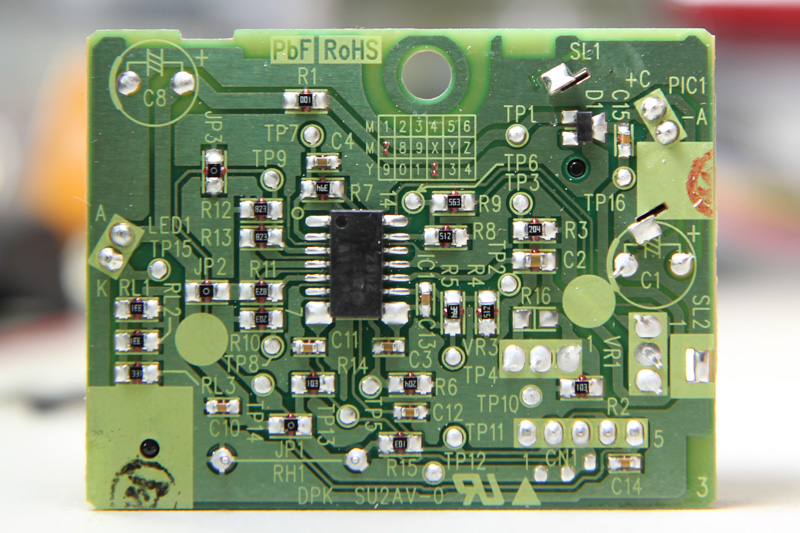
Looking at the date code grid on the PCB, the units look like they were manufactured in July 2012. The circuit consists largely of passives and an op-amp. RH1 is the resistor heater which, in theory, could be removed to save power if there was some other method of air circulation.